Tabitha Edith Lee
Postdoctoral Fellow and Roboticist

Greetings! I’m Tabitha, or “Tab” for short. I am a postdoctoral fellow and roboticist at the Département d’informatique et de recherche opérationnelle at Université de Montréal and Mila - Quebec Artificial Intelligence Institute. I am grateful to be advised by Prof. Glen Berseth and Prof. Yoshua Bengio. My research is graciously supported by the IVADO Postdoctoral Research Funding Program.
Research Focus
My research seeks to imbue robots and embodied AI with the capability of learning what to learn: understanding and utilizing the meta-level principles, organization, and objects that govern learning. My research strives to move machine learning towards methods for understanding the underlying data generating processes, intelligent sequencing of learning through curricula and goal-setting, and richer representations for acquiring and transferring knowledge. My research goal is to design robots and agentic AI that can safely close their own learning loop in order to augment and empower humanity within our open world. Towards this end, I am currently investigating causal robot intelligence, including the implications of causality for foundation models; curriculum learning and goal-conditioned learning for reinforcement learning agents; and safety in generative models.
About Me
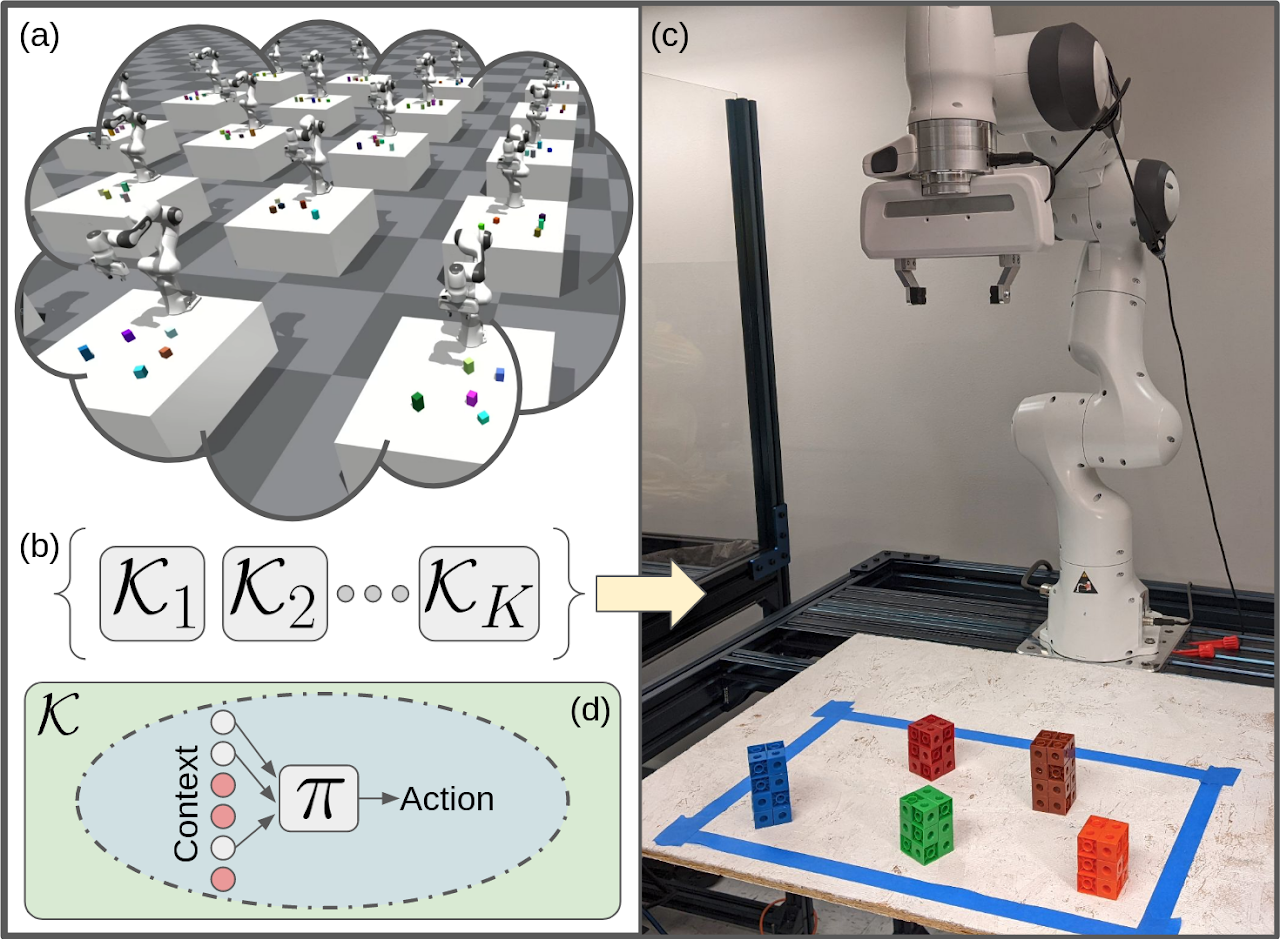
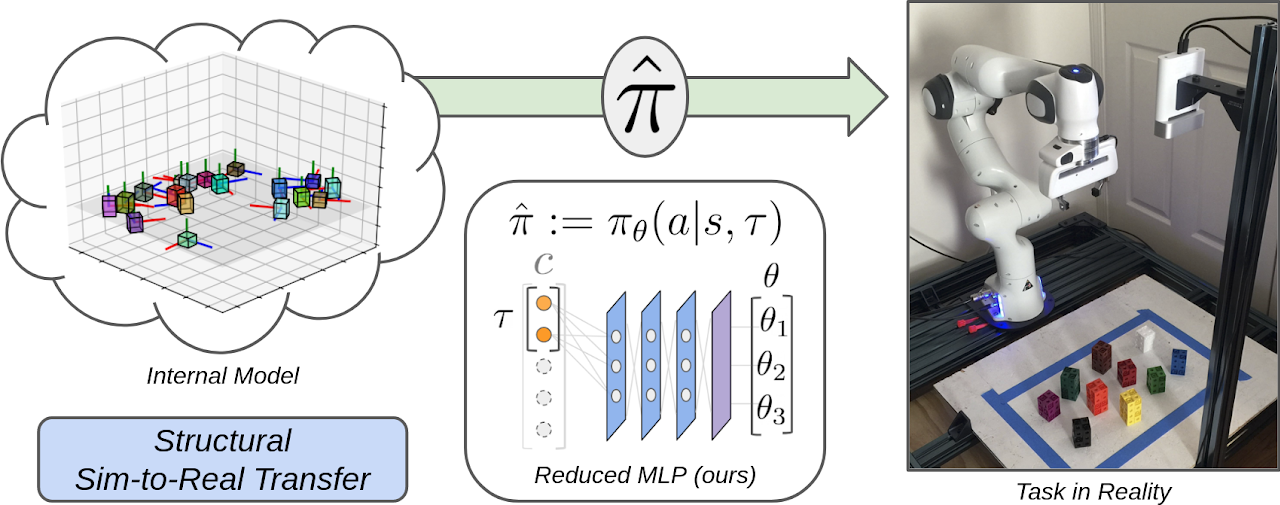
Previously, I completed my Ph.D. in Robotics at the Robotics Institute at Carnegie Mellon University, where I was a member of the Intelligent Autonomous Manipulation group led by Prof. Oliver Kroemer. During my Ph.D., my thesis focused on causal robot learning for manipulation. Specifically, I investigated the interplay between robot perception and control through the lens of causality to learn and leverage the causal structure of manipulation tasks. To this end, my research built toward a causal robot learning system that empowers lifelong autonomous manipulation in challenging, open-world settings, such as homes, hospitals, and restaurants.
Additionally, I am broadly interested in fundamental robotics and machine intelligence problems that have strong real-world impact. I am grateful for the opportunity to explore such problems as a Senior Autonomy/Artificial Intelligence Researcher at the Advanced Technology Center of Lockheed Martin Space following my Ph.D., as well as during my prior internships with NVIDIA’s Seattle Robotics Lab, Lockheed Martin Space ATC, and Uber ATG.
Prior to my Ph.D., I invented, developed, and tested a vision-based localization system for an underwater robot that inspects nuclear reactors. This technology was invented through my M.S. in Robotics research with Prof. Nathan Michael and the Resilient Intelligent Systems Lab. Before CMU, I led the development of multiple software capabilities for safety-critical autonomous systems in the aerospace industry.
I am also an IVADO Postdoctoral Research Funding Program recipient, an RSS Pioneer, an NCWIT Collegiate Award Honorable Mention recipient, and a Siebel Scholar in Computer Science.
news
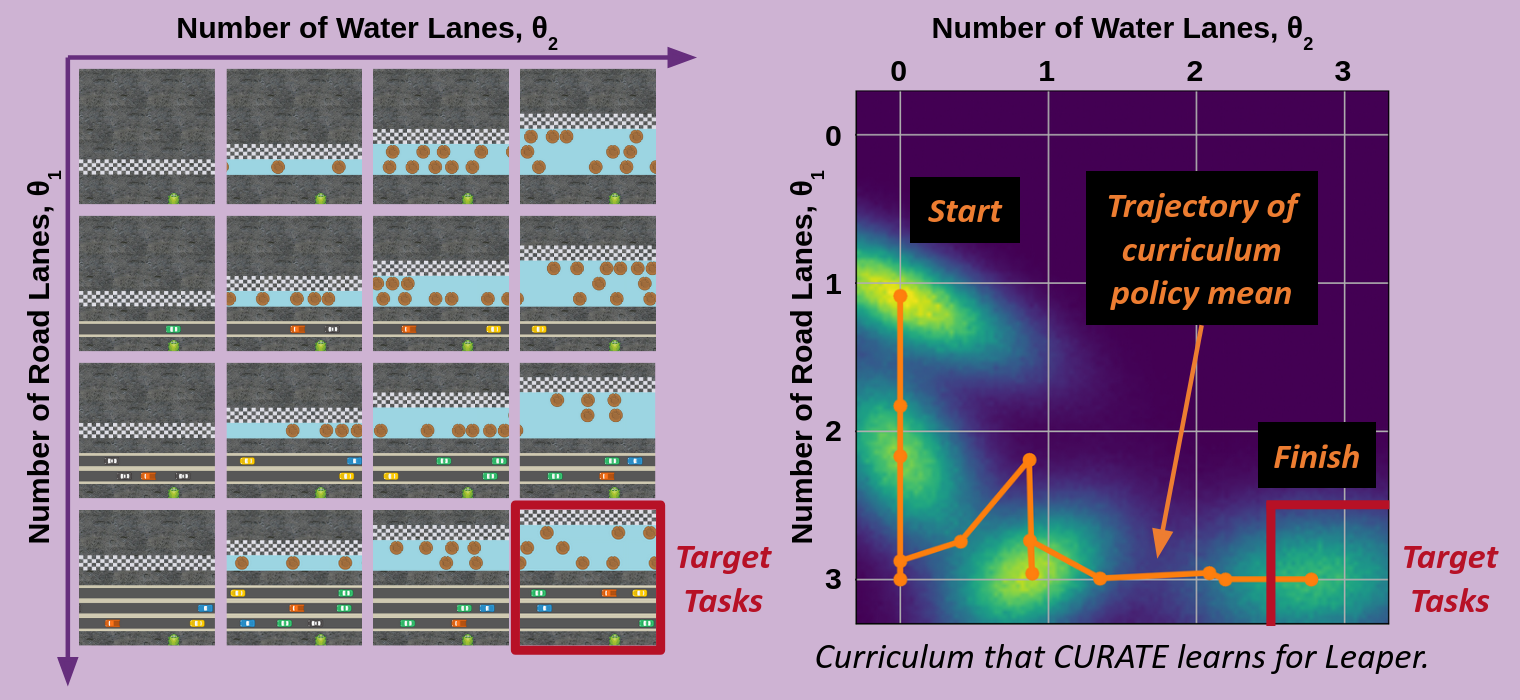
| Nov 07, 2025 | I gave an invited talk about CURATE, our curriculum learning algorithm, at the RL Sofa seminar at Mila! Thanks very much to the RL Sofa organizers for the wonderful opportunity! |
|---|---|
| Oct 20, 2025 | Many thanks to Mila and the Lamarr Institute for the chance to give a short talk about our work in CURATE! |
| Sep 27, 2025 | Thank you to our speakers, panelists, contributed papers, and attendees for our CoRL 2025 workshop on Resource-Rational Robot Learning! We had an exciting day exploring how robots can be more rational with their resources. |
| Aug 25, 2025 | Thank you, IVADO, for the great opportunity to talk about curriculum learning and generalist agents at the Regroupement 2 - Machine Learning Workshop! |
| Jul 16, 2025 | Our workshop on Resource-Rational Robot Learning has been accepted to CoRL 2025! Please join us in Seoul to discuss rational robots that learn more efficiently, pragmatically, and resourcefully! |
| Jul 01, 2025 | CURATE, our curriculum learning algorithm for RL agents, has been accepted as a workshop paper at the Exploration in AI Today workshop at ICML 2025! |
| May 20, 2025 | I am delighted to share that I have been selected as a recipient of the IVADO 2025 Postdoctoral Research Funding Program! Thank you very much, IVADO, for your generous support of my research! |
| Feb 24, 2025 | I have started my postdoc with Prof. Glen Berseth and Prof. Yoshua Bengio at Université de Montréal and Mila! Excited for the wonderful opportunity! 👩🏻🔬 |